蟻群算法在實際中的應用、 上一篇介紹了快速搜索隨機樹(RRT)算法的原理,這是一種基于采樣的路徑規劃算法,在地圖尺寸較大時,其效率將顯著的優于基于圖搜索的路徑規劃算法(如A*)。
然而,RRT也有其局限性,如:
本篇將針對RRT算法應用時出現的幾個問題展開討論,并闡述幾種RRT算法的改進型。
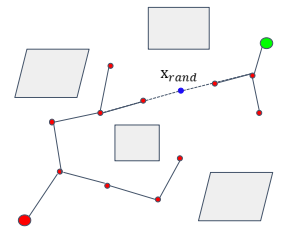
RRT算法中有一個重要的環節——獲取搜索樹種距離采樣點最近的節點:
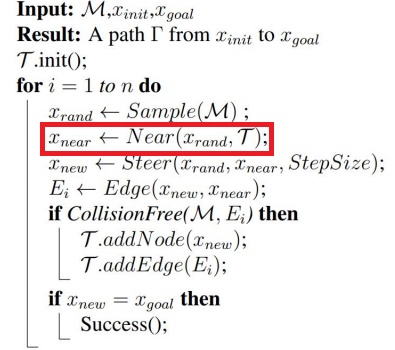
該算法的效率直接影響了RRT算法的搜索效率,因此,本篇單獨對其進行討論。
在工程中,我們將搜索樹構建為KD-Tree(K-dimensional Tree),通過KD-Tree來搜索相鄰節點,它改進的就是上圖中的
KD-Tree(K-dimension tree)是一種對
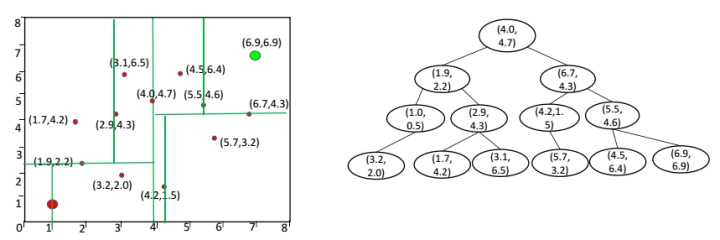
對于RRT算法,我們對搜索樹進行KD-Tree構建,以二維問題為例,我們取所有節點中
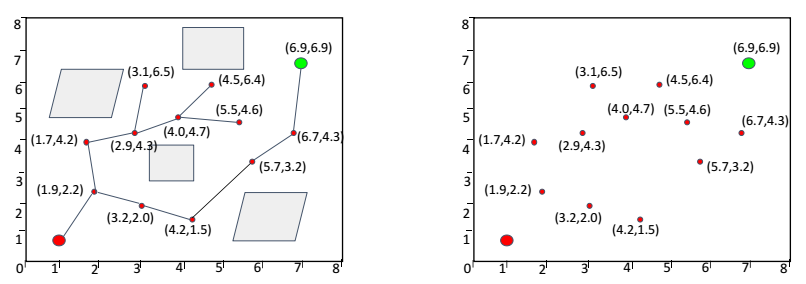
在得到KD-Tree后,我們可以根據需要,快速地搜索到距離
由于RRT算法通常采用蒙特卡洛法采樣,其采樣概率是均勻分布的,因此,對于狹窄通道(Narrow Passage)的情況,RRT算法的搜索效率將大大降低(搜索樹的生長需要經過狹窄通道才能達到目標點,而采樣點剛好落在狹窄通道的概率相對于整張地圖而言較低),由此,會產生如下現象:
對于該類問題,我們往往采用RRT-Connect算法進行處理,如下圖所示,與RRT不同的是,RRT-Connect分別從起始點和目標點構建搜索樹,直到兩棵搜索樹相交,找到一條可通行的路徑。
該算法可以大大降低Narrow Passage中由于狹窄通道采樣概率較低的問題,具體的實現在此不做贅述,讀者可自行搜索Bidirectional RRT / RRT Connect。
傳統的RRT算法搜索得到的路徑往往不是全局最優的,于是,RRT算法的改進型——RRT*應運而生。
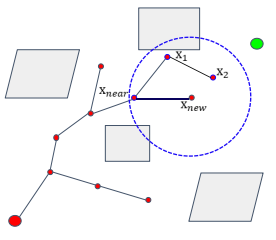
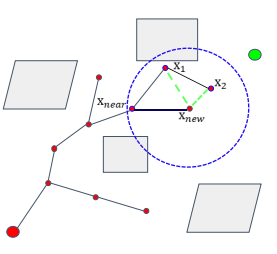
RRT*是在 RRT算法框架基礎上進行了一定的改進,算法流程如下圖所示:
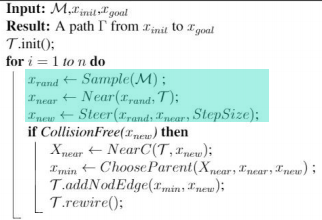
與RRT相似的是,我們都需要通過
與RRT不同的是,RRT*中,我們在碰撞檢測成功后,搜索以
這里可以對上文提及的KD-Tree搜索方法進行一定的改進,即將
然后,在相鄰節點集合
最后,我們需要對重建的搜索樹進行剪枝(
例如,
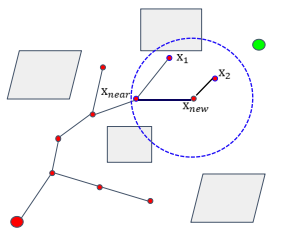
整個過程如下所示,可以看到,RRT* 在搜索到一條可通行路徑后,并未停止迭代,而是繼續剪枝。從而得到一條接近全局最優的可通行路徑,因此,RRT* 較RRT在實際工程中有更廣泛的應用。
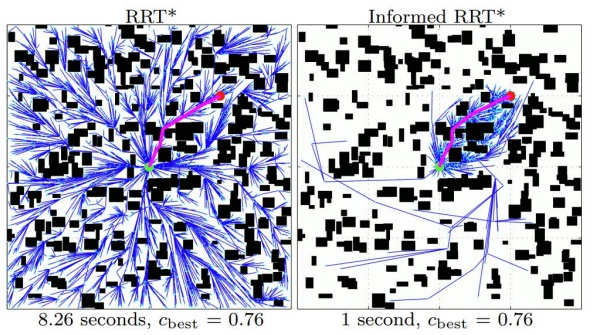
從上圖可以很容易地發現一個問題,當RRT*找到一條可通行路徑時,其采樣函數依然在整個地圖空間中進行均勻采樣,然而進行剪枝等操作,那么這樣的采樣方式顯然會耗費大量不必要的時間。
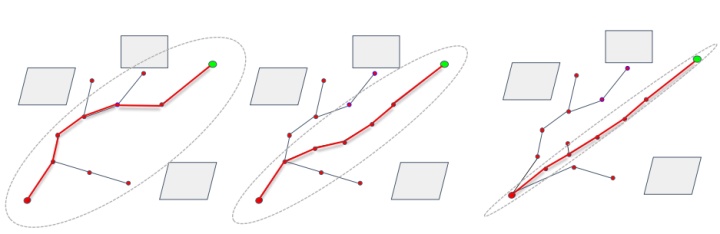
Informed-RRT* 被用于優化該問題,如下圖所示,Informed-RRT* 較RRT*節省了大量的時間,究其原因在于優化了采樣方式。
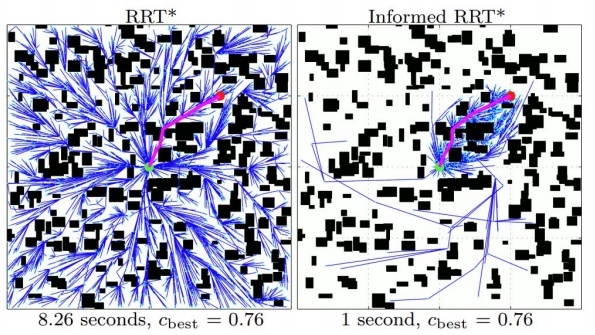
Informed-RRT* 在得到一條可通行路徑的基礎上,以起始點與目標點之間的連線為橢圓的長軸構建橢圓形采樣區域,采樣函數的采樣范圍被重新限制在該區域范圍之中,隨著搜索樹的不斷剪枝,橢圓范圍也在不斷地縮小,采樣時間也隨之減少,由此,大幅度節省RRT*的時間開銷。
本篇闡述了一種提高RRT算法搜索效率的數據結構——KD-Tree,并圍繞RRT算法應用中碰到的幾個問題展開,簡述了RRT算法的幾種改進型——RRT* 與Informed-RRT*,下一篇中將對滿足動力學約束的基于采樣的路徑規劃算法展開討論。
作者簡介: 一個被Coding耽誤的無人機算法工程師,控制、導航略懂一二,熱衷技術,喜歡乒乓、音樂、電影,歡迎交流。
知乎: @遙遠的烏托邦
GitHub: https://github.com/DistantUtopia
微信公眾號: @遙遠的烏托邦
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态