首页
语法
变量
函数
技术动态
基础知识库
首页
/
ros获取当前坐标
ROS笔记(10) TF坐标
ROS笔记(10) TF坐标 1. 简介2. 功能包3. 举例4. 工具5. 应用6. TF广播器7. TF监听器8. 添加参考系 1. 简介 在机器人的控制中,坐标系统是非常重要的 ros路径规划仿真。 机器人本体和机器人的工作环境中往往存在大量的组件元素 都会涉及到不同的姿态和位置 因此需要引入坐标
时间:2023-09-18 | 阅读:23
ROS笔记(37) 抓取和放置
ROS笔记(37) 抓取和放置 1. pick and place2. 启动机械臂3. 创建抓取的目标物体4. 设置目标物体的放置位置4. 设置抓取姿态5. pick6. place7. 启动抓取和放置 1. pick and place 本博客讲介绍一个更加复杂的机器人应用: pick and place 简单来讲,这个应用就是让机器人用夹
时间:2023-09-18 | 阅读:16
ROS-坐标转换
个人博客:http://www.chenjianqu.com/ 原文链接:http://www.chenjianqu.com/show-73.html arcmap转换坐标系?坐标转换 坐标转换是机器人学中的基本概念,因为机器人中存在大量的组件,每个组件有不同的坐标系。一个坐标系可以通过平移和旋转得到
时间:2023-09-09 | 阅读:20
ROS调用ORB-SLAM2
个人博客:http://www.chenjianqu.com/ ORB算法。原文链接:http://www.chenjianqu.com/show-106.html 在博文<ORB-SLAM2编译安装>中,我们编译安装了ORB-SLAM2,也运行了其自带的ROS例程。但是该ROS程序基于rosbuild编译,而我们现在更多
时间:2023-09-09 | 阅读:20
ROS在rviz中实时显示轨迹和点
记录一个简单的例子方便复制: 通过使用 nav_msgs::Path geometry_msgs::PoseStamped geometry_msgs::PointStamped 来实现rviz中可视化轨迹和轨迹点。 首先创建工程: mkdir -p showpath/src cd src catkin_create_pkg showpath roscpp rospy sensor_msgs std_ms
时间:2023-09-09 | 阅读:18
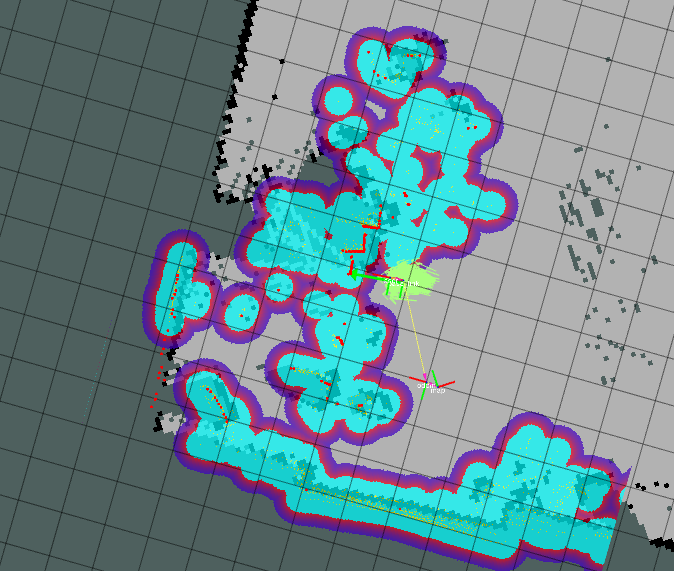
ros机器人导航设置原点,目标点
之前利用movebase导航定位都是通过rviz用鼠标指来指去,实验时非常方便,但实际应用总不能也人工指来指去吧,这怎么体现智能呢 启动导航后,用以前使用的rviz设设置目标点来获取map坐标系下的位置坐标 使用 2d Nav Goal 指你想要的家坐标 查看rviz终
时间:2023-09-05 | 阅读:251
阅读排行
2748℃
1
如何防止应用程序泄密?
2742℃
2
AlertDialog禁止返回键
2562℃
3
linux中MySQL密码的恢复方...
2498℃
4
node.js当中net模块的简单...
2250℃
5
我的高质量软件发布心得
2181℃
6
从源码角度看Spark on yar...
2030℃
7
在linux云服务器上运行Jar...
1603℃
8
codevs1521 华丽的吊灯
猜你喜欢
SHELL _02
笔记四+步骤截图
AlertDialog禁止返回键
深度学习必备包
OO模式-Composite
不好意思,00后黑客CEO登场了!
二进制安装mysql5.7
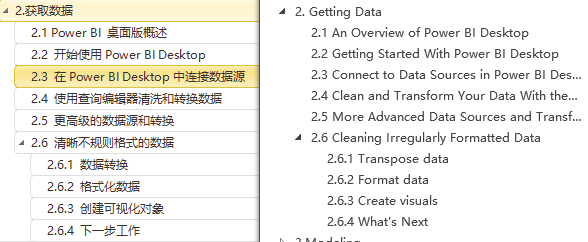
一起学微软Power BI系列-官方文档-入门指南(2)获取源数据
ORACLE 查询所有用户调度作业
我想做产品,实现一个非常优秀的电脑桌面记事本加闹钟
MyBitis(iBitis)系列随笔之五:多表(一对多关联查询)
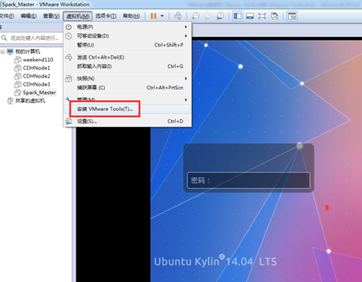
VMware里Ubuntu-14.04-desktop的VMware Tools安装图文详解
热门标签
python3
Spring boot
python有什么用
python和java
java
Springboot教程
python编程
Leetcode
python爬蟲教程
python菜鳥教程
Springboot注解
Mybatis
Springboot框架
Springboot
UNIXLINUX
SpringBootApplication
python为什么叫爬虫
qpython
我要关灯
我要开灯
客户电话
工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
官方微信
扫码二维码
获取最新动态
返回顶部