首页
语法
变量
函数
技术动态
基础知识库
首页
/
ros导航
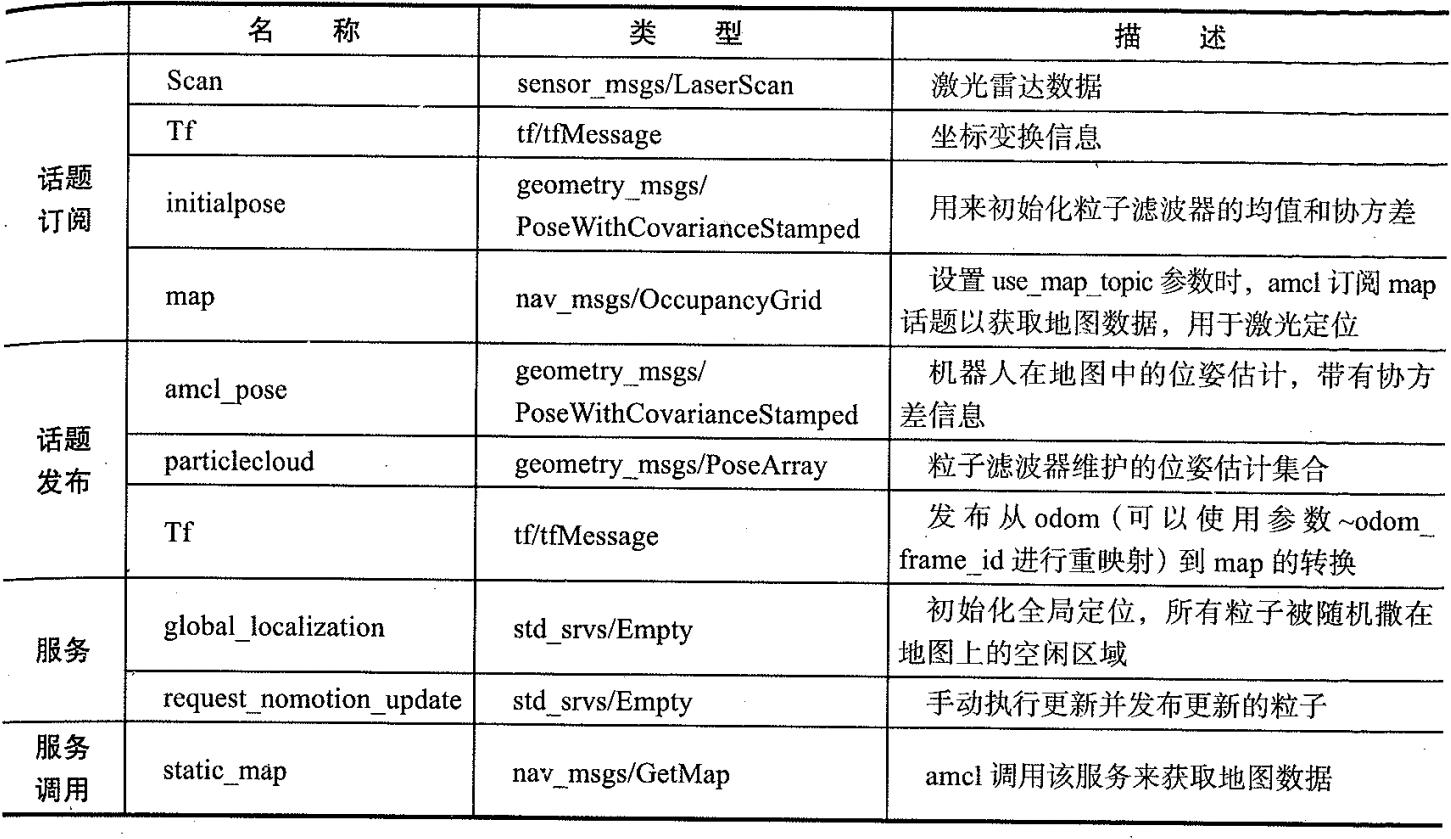
ROS-机器人导航
导航常用的数据类型 std_msgs/Header 标准消息头 uint32seq#序号 timestamp#时间戳 stringframe_id#该数据所在的坐标系 ros机器人开发实践、 geometry_msgs/Point 空间三维坐标 float64x float64y float64z 机器人必须要ros吗。geometry_msgs/Quaternion 表示旋转的四元数 fl
时间:2023-09-09 | 阅读:18
ros机器人导航设置原点,目标点
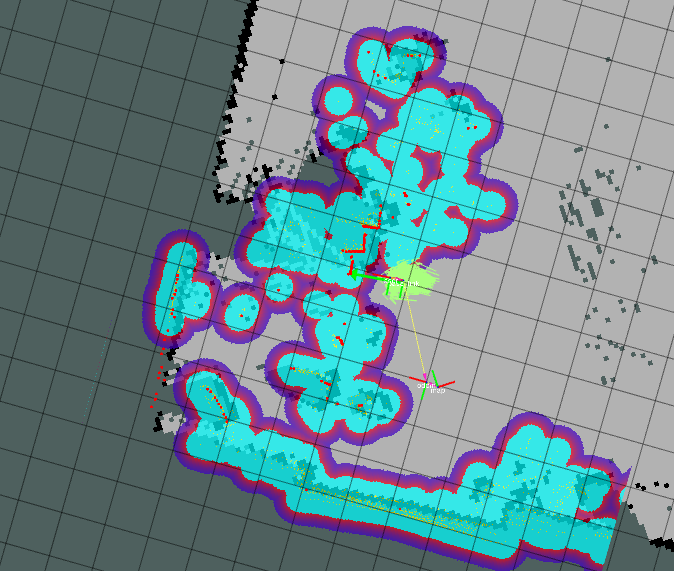
之前利用movebase导航定位都是通过rviz用鼠标指来指去,实验时非常方便,但实际应用总不能也人工指来指去吧,这怎么体现智能呢 启动导航后,用以前使用的rviz设设置目标点来获取map坐标系下的位置坐标 使用 2d Nav Goal 指你想要的家坐标 查看rviz终
时间:2023-09-05 | 阅读:251
阅读排行
2748℃
1
如何防止应用程序泄密?
2742℃
2
AlertDialog禁止返回键
2562℃
3
linux中MySQL密码的恢复方...
2498℃
4
node.js当中net模块的简单...
2250℃
5
我的高质量软件发布心得
2181℃
6
从源码角度看Spark on yar...
2030℃
7
在linux云服务器上运行Jar...
1603℃
8
codevs1521 华丽的吊灯
猜你喜欢
《软技能:代码之外的生存指南》一一21.3 打造成功博客的秘诀
python logging模块使用教程
Linux系统可卸载内核模块完全指南(上)
下拉加载更多--判断页面距离
从Softmax回归到Logistic回归
工厂方法模式--简单试例
《Android游戏开发详解》——第3章,第3.1节构造方法
软考(四)
EhCache 常用配置项详解
ExchangeServer2016 HAB 分层通讯簿 设置教程
朝鲜不小心泄漏了它的.kp域名DNS数据
201521123040《Java程序设计》第10周学习总结
热门标签
python3
Spring boot
python有什么用
python和java
java
Springboot教程
python编程
Leetcode
python爬蟲教程
python菜鳥教程
Springboot注解
Mybatis
Springboot框架
Springboot
UNIXLINUX
SpringBootApplication
python为什么叫爬虫
qpython
我要关灯
我要开灯
客户电话
工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
官方微信
扫码二维码
获取最新动态
返回顶部